سیستم تعیین موقعیت تصویری بلادرنگ داخل اتاق
محور پژوهش
برق و الکترونیک، لیزر و فوتونیک پژوهشکده اویونیک
حوزه پژوهش
تجهیزات ارتباطی، مخابراتی، اویونیک و هوافضا
عنوان
گیرنده سامانه ناوبری-نظارتی ADS-B
هدف از اجرای پژوهش، کاربردها، مزیتها و ضرورت انجام پروژه
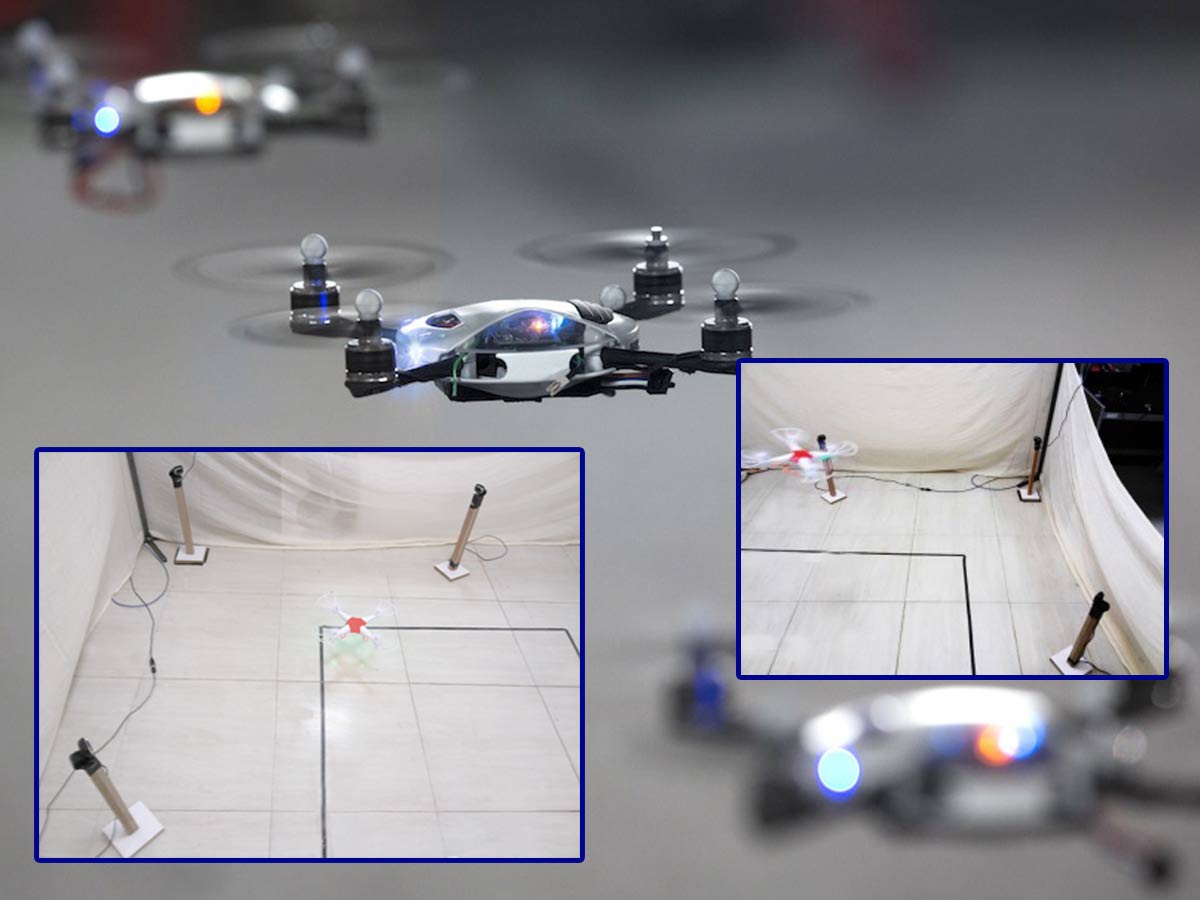
: شناسایی و ردیابی اهداف متحرک در فریمهای متوالی از یک جریان ویدیویی کاربردهای متنوعی در رباتیک، صنایع نظامی، سیستمهای حفاظتی و بینایی ماشین دارد. در محیطهای بسته که معمولاً سنسورهای کمک ناوبری قابل استفاده نیستند، سیستمهای ناوبری مبتنی بر الگوریتمهای پردازش تصویر میتوانند گزینه مناسبی باشند. الگوریتم پیشنهادی ما در این زمینه، معرفی یک سیستم چند سنسوری کاملاً اتوماتیک به منظور تعیین موقعیت سهبعدی هدف در درون اتاق با استفاده از الگوریتمهای پردازش تصویر میباشد. با توجه به چالشهای موجود در این زمینه، در این راستا تلاش شده، با استفاده از ترکیب اطلاعات غیرهمزمان تعدادی از دوربین که دارای قیمت و کیفیت مناسبی میباشند، راهحل مناسبی ارائه گردد. گزارش و شرح زیرساختها، فعالیتها، و دستاوردها الگوریتم پیشنهادی ما در این زمینه، معرفی یک سیستم چند سنسوری کاملاً اتوماتیک به منظور تعیین موقعیت سهبعدی هدف در درون اتاق با استفاده از الگوریتمهای پردازش تصویر میباشد. با توجه به چالشهای موجود در این زمینه، در این راستا تلاش شده، با استفاده از ترکیب اطلاعات غیرهمزمان تعدادی از دوربین که دارای قیمت و کیفیت مناسبی میباشند، راهحل مناسبی ارائه گردد. لذا بعد از شناسایی هدف به کمک ویژگیهای استخراج شده و تعیین موقعیت دوبعدی آن در تصویر هر دوربین، با استفاده از فیلتر کالمن توزیع شده، موقعیت سهبعدی هدف به صورت بلادرنگ تعیین میگردد. سنسورهای مورد انتخاب در این محصول، دوربینهایی کمهزینه و با کیفیت متوسط میباشند بنابراین سیستم مذکور کاملاً مقرون به صرفه است. از این رو نتایج بدست آمده از این الگوریتم، برخلاف دیدگاه مورد بررسی در مقالات سالهای اخیر میباشد. از جمله مهمترین خدماتی که در این حوزه قابل ارائه است عبارتنداز: •استفاده از تعداد زیادی دوربین با کیفیت متوسط •پوشش کامل محیط توسط دوربینهای کم هزینه •استفاده از اطلاعات غیرهمزمان بدست آمده از هر دوربین در هر لحظه •تلفیق اطلاعات بدست آمده از تصویر هر دوربین با استفاده از فیلتر کالمن توزیع شده توسعه یافته •زمان پاسخ الگوریتم برابر با 150 میلی ثانیه •اجرای الگوریتم به صورت پردازش موازی با استفاده از برنامهنویسی OpenMP •پردازش بلادرنگ الگوریتم •تشخیص دقیق اهداف •شناسایی دقیق موقعیت سهبعدی چندین هدف به صورت همزمان •دقت بالای الگوریتم تصاویر و محتوای گرافیکی مرتبط تصویری از سامانه طراحی و ساخته شده: